
はじめに
交通渋滞の緩和と効率的な移動の実現は、世界中の都市が抱える重要な課題です。その解決策の一つとして注目されているのが、複数人が乗車する車両専用の高占有車両(HOV)レーンです。このHOVレーンは一般レーンよりも高速で移動できるため、正確な所要時間予測が重要になります。
本稿では、Google Researchが2025年6月に発表した「How we created HOV-specific ETAs in Google Maps」をもとに、GoogleマップがHOVレーン専用の所要時間予測(ETA:Estimated Time of Arrival)機能をどのように実現したかを詳しく解説します。この技術は、ラベル付きデータが不足する中で無教師学習と混合エキスパートモデルを活用した点が革新的なアプローチです。
引用元記事
- タイトル:How we created HOV-specific ETAs in Google Maps
- 著者:Sara Ahmadian(Research Scientist, Google Research)
- 発行元:Google Research Blog
- 発行日:2025年6月30日
- URL:https://research.google/blog/how-we-created-hov-specific-etas-in-google-maps/
・本稿中の画像に関しては特に明示がない場合、引用元記事より引用しております。
・記載されている情報は、投稿日までに確認された内容となります。正確な情報に関しては、各種公式HPを参照するようお願い致します。
・内容に関してはあくまで執筆者の認識であり、誤っている場合があります。引用元記事を確認するようお願い致します。
要点
- HOVレーンは一般レーンより平均16%高速であり、ユタ州ソルトレイクバレーでは平均速度が68.18 mphに対し一般レーンは58.60 mphである
- 従来の速度データだけでは判別困難なHOV利用とそうでない利用を、無教師学習で分類する新手法を開発した
- セグメント単位の分類から始まり、道路の横方向距離、時間的重み付け、ソフトクラスタリングを組み合わせた
- 混合エキスパート(MoE)アプローチで複数の分類器の結果を統合し、最終的な判定精度を向上させた
- ETA精度を75%改善し、HOV利用者の精度を一般道路利用者と同等レベルまで向上させた
詳細解説
HOVレーンとは何か
HOV(High-Occupancy Vehicle)レーンは、複数人が乗車する車両専用の車線です。カープールレーンとも呼ばれ、交通渋滞の緩和と相乗りの促進を目的としています。米国では広く普及しており、ラッシュアワー時には一般レーンよりも大幅に速い移動が可能です。
日本では類似の制度として、首都高速道路の路線バス等優先通行帯や、一部区間での複数人乗車優遇の実験が行われていますが、HOVレーンほど広範囲での導入は進んでいません。しかし、環境負荷軽減と交通効率化の観点から、今後注目される技術領域です。

技術的課題:HOV利用の判別困難性
HOVレーン対応のETA予測における最大の課題は、どの車両がHOVレーンを利用しているかを正確に判別することです。従来のGPSデータや速度情報だけでは以下の問題があります:
- 交通量が少ない時間帯では、HOVレーンも一般レーンも似たような速度になる
- GPSの精度限界により、どの車線を走行しているかの正確な特定が困難
- ラベル付きデータの不足により、教師ありの機械学習が適用できない
無教師学習による革新的アプローチ
Googleの研究チームは、これらの課題に対して無教師学習による分類手法を開発しました。この手法の核となるのはセグメント単位の分類です。
セグメント単位の分類手法
各道路セグメント(区間)について、15分間という短時間窓内で収集された複数の走行データを同時に分析します。各走行は以下の情報を含む「トリップポイント」で構成されます:
- 速度情報
- 道路中心からの横方向距離
- 観測時刻
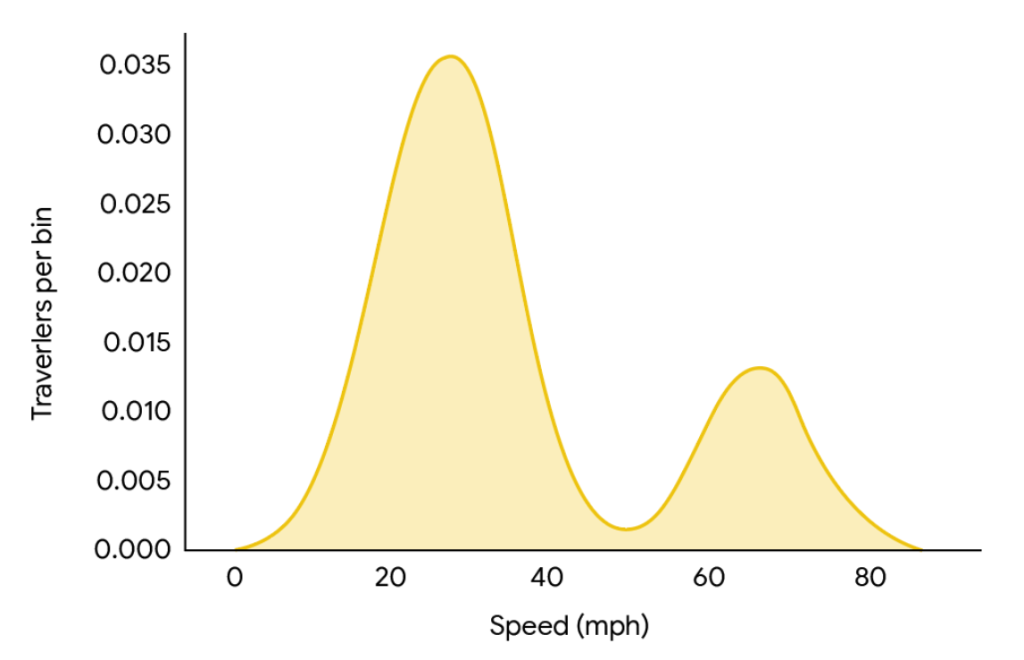
重要なのは、双峰性の速度分布を検出することです。この技術では2つの異なるシナリオに対応する必要があります:
シナリオA(明確な速度差): HOVレーンと一般レーンの速度差が大きい場合です。例えば、シアトルのI-5では16:00-16:30の時間帯で、HOVレーンが65 mph、一般レーンが25 mphという40 mphもの大きな差が観測されました。この場合、明確に2つの速度集団が現れ、分類は比較的容易です。
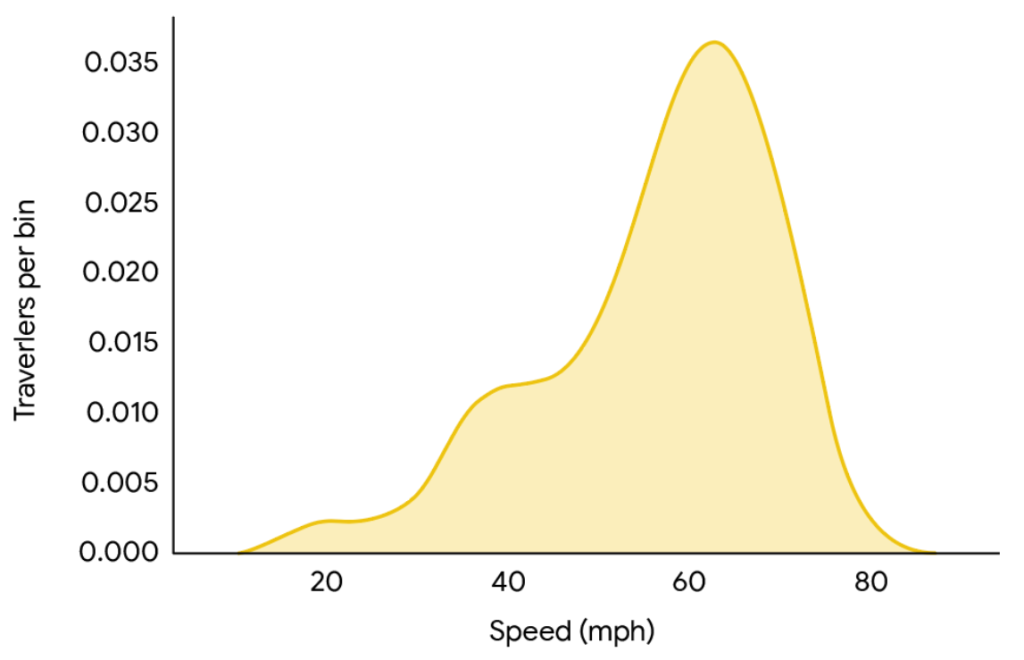
シナリオB(微細な速度差): HOVレーンが一般レーンよりも速いものの、その差が小さい場合です。同じシアトルの道路区間でも、HOVレーンが67 mph、一般レーンが55 mphと、わずか12 mphの差しかない時間帯もあります。この場合、統計的に有意ではない差のため、速度情報だけでは正確な分類が困難になります。
横方向距離情報の活用による分類精度向上
速度情報に加えて、道路中心からの推定横方向距離も重要な判別要素として活用されています。GPSの本質的な精度限界により、この距離情報にはノイズが含まれるものの、速度データと組み合わせることで分類精度を大幅に向上させることができます。
研究では、シアトル首都圏の5車線高速道路セグメントでの実データを分析しています。この道路では左側2車線がHOVレーンとして指定されており、ラッシュアワーの匿名化された交通データを用いて検証が行われました。
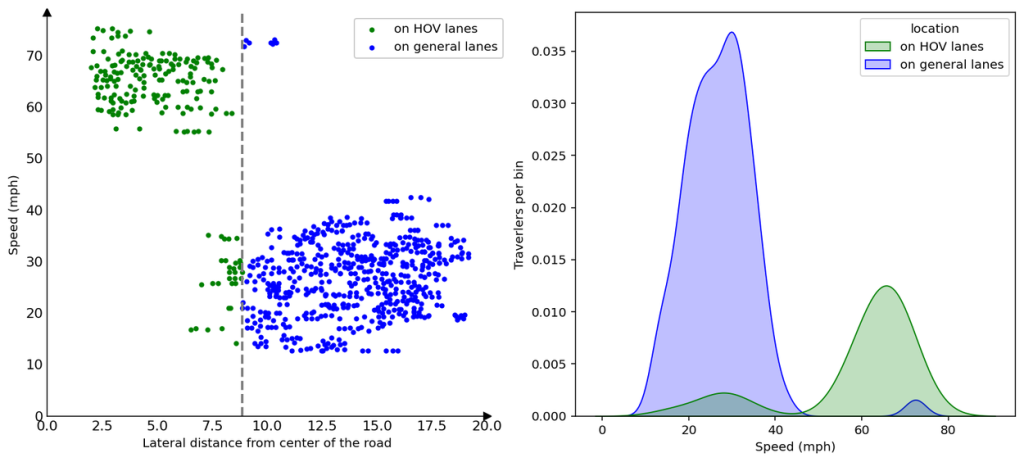
シナリオAの詳細分析: HOVレーンと一般レーンの速度差が顕著な場合(平均速度65 mph対25 mph)では、以下の特徴が明確に現れます:
- 左側グラフ:横軸が道路中心からの横方向距離、縦軸が記録速度を示し、各データポイントがHOVレーン内(緑)か一般レーン(青)かで色分けされています
- 右側グラフ:速度分布をHOVレーン利用・非利用で分けて表示し、明確な双峰性分布を確認できます
- 重要な発見:道路の左側(負の横方向距離)に位置するデータポイントほど高速度を示し、これがHOVレーン利用の強い物理的指標となります
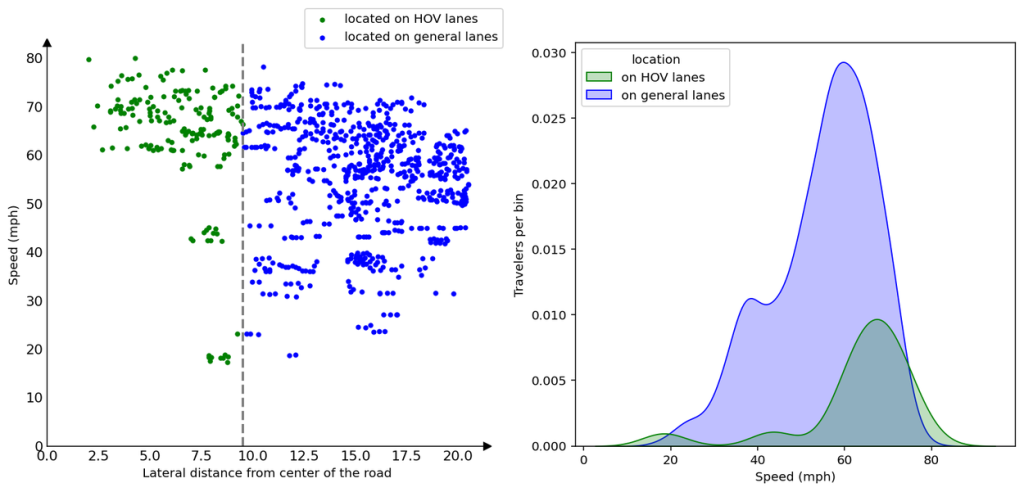
シナリオBの課題と対応: HOVレーンの速度優位性が小さい場合(平均速度67 mph対55 mph)では、分類がより困難になります:
- 速度分布の重複:2つの分布が重なる領域が増加し、速度のみでの判別精度が低下します
- 横方向距離の重要性増大:速度差が小さいため、車線位置情報がより重要な判別要素となります
- 統計的手法の必要性:単純な閾値判定では不十分で、確率的アプローチが必要になります
この実例は、なぜGoogleが多次元データの統合とソフトクラスタリングを採用したかを明確に示しています。GPSの精度限界があっても、統計的に処理することで車線固有の行動パターンを確実に特定できることが実証されました。
時間的クラスタリングとソフト割り当て
従来のハードクラスタリング(各データポイントを1つのクラスタに確定的に割り当て)ではなく、ソフトクラスタリングを採用しています。これにより、各データポイントがHOVレーン利用である確率を計算し、境界領域のデータに対してより柔軟な処理が可能になります。
また、時間的重み付けにより、より最近のデータポイントに高い重要度を与える加重中央値アプローチを使用しています。
混合エキスパート(MoE)による最終判定
混合エキスパート(Mixture of Experts)アプローチにより、異なるパラメータ設定を持つ複数の分類器を並行運用し、多数決メカニズムで最終的な分類を決定します。これにより、単一の分類器では対処できない複雑なケースにも対応できます。
評価手法と結果
研究チームは、走行時間の双峰性分布を2つの正規分布でモデル化し、各走行のz-scoreを計算することで高信頼度のラベルを作成しました。このラベルに対して開発したアルゴリズムの性能を評価した結果:
- 全体のETA精度が75%向上
- HOV利用者の精度が一般道路利用者と同等レベルに
- 速度比較のみの初期手法と比較して18%の精度向上
まとめ
Googleが開発したHOVレーン特化ETA予測技術は、ラベル付きデータが不足する現実的な制約の中で、無教師学習、ソフトクラスタリング、混合エキスパートモデルを組み合わせた革新的なアプローチです。
この技術の重要性は、単なるETA精度向上にとどまりません。より正確な交通予測により、利用者がHOVレーンを積極的に活用し、結果として交通渋滞の緩和と環境負荷の軽減につながる可能性があります。
日本においても、自動運転技術の発展や環境意識の高まりと共に、類似の交通効率化技術への需要が高まることが予想されます。本稿で紹介した手法は、二輪車専用レーンや路線バス優先レーンなど、他の交通モードにも応用可能な汎用性を持っており、今後の交通データ分析分野の発展に大きな示唆を与える研究成果と言えるでしょう。








